SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13468
所在地: 139.67E 35.65N
|
 日時: Wed Mar 04, 2009 9:17 am 記事の件名: 収差補正関数について 日時: Wed Mar 04, 2009 9:17 am 記事の件名: 収差補正関数について |
 |
|
魚眼レンズ+II+リレーレンズというシステムについて
収差補正関数の検討をしたので、結果を報告しておきます。
このシステムはスロバキアで運用されているもので、
15mmF2.8の写真用魚眼レンズ + 30pix/mmのII + 19mmF1.9のリレーレンズ + WAT120N
で 1/25秒露光 (通常の倍)で運用されており、180度の円形視野に快晴夜には5等まで
約300個以上の恒星がマスクされます。
このシステムのUA2における dpix avr は0.5ヒクセル程度、ddeg avr は 0.1度程度でした。
90度視野のCBC 3.8mmに比べてFOVは2倍なので、誤差も2倍程度が期待値なのですが、
実測では 3倍から4倍の誤差があり、その原因を調べました。
当初、UA2の現状の 4次の多項式による収差補正が不十分の可能性があると思い、以下の文献を
参考に 2次の指数関数による補正を試みました。
A New Positional Astrometric Method for All-Sky Cameras
Borovicka, J.; Spurny, P.; Keclikova, J.
Proceedings of the 3rd International Workshop on Positional Astronomy and Celestial Mechanics, held in Cuenca, Spain, October 17 - 21, 1994
UA2を一時的に修正して約200個の恒星をもとにパラメータの最適化を行った結果、
Borovicaの指数関数を利用した式によるこのシステムの最適値は以下となりました。
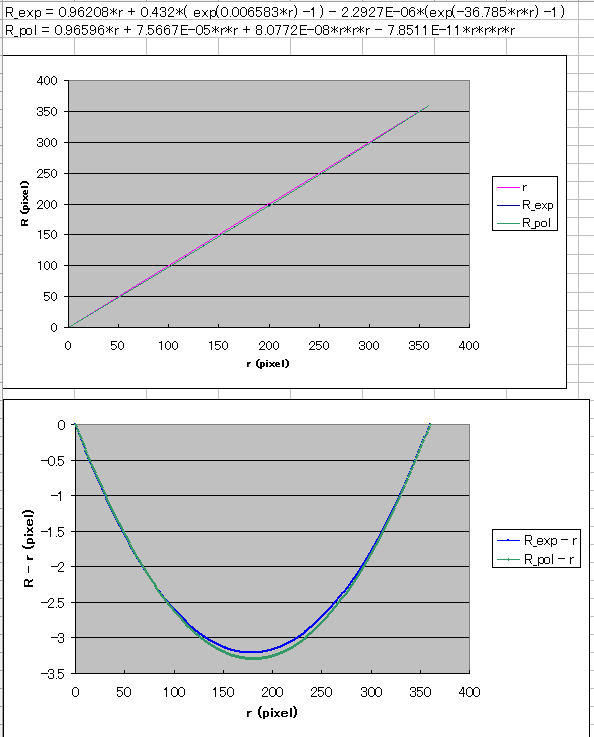
R_exp = 0.96208*r + 0.432*( exp(0.006583*r) -1) - 2.2927E-06*(exp(-36.785*r^2) -1)
(R,r: 光軸中心からの距離(ピクセル) 0-360)
一方、従来のUA2の4次の多項式を用いた補正は以下となりました。
R_pol = 0.96596*r + 7.5667E-05*r^2 + 8.0772E-08*r^3 - 7.8511E-11*r^4
(UA2の表現では k2=0.02724, k3=0.010468, k4=-0.003663)
結果、両者は図に示すように視野全体で0.1ピクセル程度の誤差でよく一致しました。これは光芒の中心位置の決定精度の数分の1程度です。
つまり、このシステムで誤差が多い原因は収差補正関数の問題ではなく、
IIの解像度と明度リニアリティの問題により、星像が膨らみ、明度の加重平均による光芒の中心位置決定誤差が増加したためである
ということになりました。
尚、スロバキアの件に関しては、写真観測とUA2ビデオ観測の併用時に地球自転速度の扱いの違いがあるようで、
いまだ両者が満足できる結論に至っておらず、すり合わせが続いています。
ご参考まで。
| 説明: |
|
| ファイルサイズ: |
20.44 KB |
| 閲覧数: |
3586 回 |
|
|
|

