| 前のトピックを表示 :: 次のトピックを表示 |
| 投稿者 |
メッセージ |
上田昌良
登録日: 2005.02.07
記事: 3323
所在地: 大阪府
|
 日時: Sat Nov 15, 2008 8:08 pm 記事の件名: AnalyzerV2関連で質問です 日時: Sat Nov 15, 2008 8:08 pm 記事の件名: AnalyzerV2関連で質問です |
 |
|
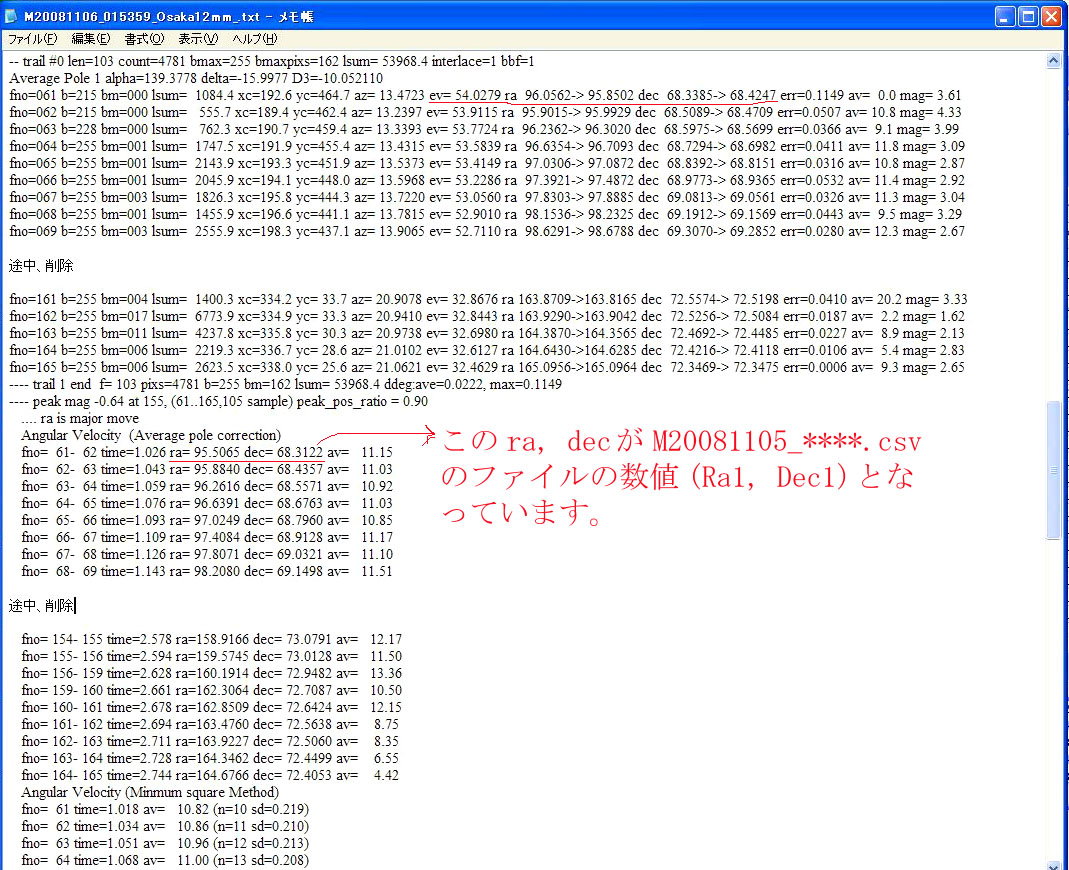
UFOAnalyzerV2で次の操作をします。
Uty 画面 → analyzlogをチェック
そして、AnalyzerV2ソフトを作動させます。
これで、流星の動画のあるホルダーに次ぎのようなファイルが
作成されます。
M20081106_015359_Osaka12mm_.txt
この中身の数値で質問です。
赤線部分のra, decが流星の発光点の位置です。
それに対応しますのが、図の下側の数値
fno=61-62............ra, dec この数値は、フレーム61晩と62番から出したように
おもえるのですが、前述の発光点fno061, fno062からどうしても、このfno61-62
のra,decの数値になりません。このfno=61-62............ra, dec の流星の発光点
ra,dec位置はどうのようにして求められた数値なのでしょう。
もっと早い時期に質問すべきでしたが、今頃になりもうしわけありません。
覚えておられましたら教えてください。
| 説明: |
|
| ファイルサイズ: |
353.1 KB |
| 閲覧数: |
9333 回 |
|
|
|
| トップに戻る |
|
 |
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13558
所在地: 139.67E 35.65N
|
| 日時: Sat Nov 15, 2008 9:27 pm 記事の件名: Re: AnalyzerV2関連で質問です |
|
|
| 上田昌良 wrote: | UFOAnalyzerV2で次の操作をします。
Uty 画面 → analyzlogをチェック
そして、AnalyzerV2ソフトを作動させます。
これで、流星の動画のあるホルダーに次ぎのようなファイルが
作成されます。
M20081106_015359_Osaka12mm_.txt
この中身の数値で質問です。
赤線部分のra, decが流星の発光点の位置です。
それに対応しますのが、図の下側の数値
fno=61-62............ra, dec この数値は、フレーム61晩と62番から出したように
おもえるのですが、前述の発光点fno061, fno062からどうしても、このfno61-62
のra,decの数値になりません。このfno=61-62............ra, dec の流星の発光点
ra,dec位置はどうのようにして求められた数値なのでしょう。
もっと早い時期に質問すべきでしたが、今頃になりもうしわけありません。
覚えておられましたら教えてください。 |
この点は、本当に苦労した点なので、一応覚えています  。 。
この話はかなり複雑です。
最初の部分は各点の観測値そのものです。
当初は、この特定のフレームにおける測定値中から、開始点、終了点を選び、その値をそのまま開始点終了点としていました。
ところが、その方法は観測速度のばらつきが極めて大きく対策が必要でした。
そこで、まず、方向については、全観測点から最小自乗法でそれらと最も少ない誤差となる経路平面極方向を算出し、これをcsvに記録するようにしました。これで輻射点座標については大幅な改善がありました。
ところが、観測速度については満足のいく改善となりませんでした。
で、調査したところ、開始点と終了点に特定フレームの観測値そのものを使用すると、それらは最小自乗法で求まった極と必ずしも直交していない という点がその第一の原因であることが分りました。
そこで、全観測点の観測方向が最小自乗法で求まった極と必ず直交するように、観測方向の直交平面への射影を求めて補正するととしました。これが第二段階です。
射影を求める方法は、独自に考えた方法で、外積計算を2度やることで実現しました。
(観測方向と極方向の外積ベクトルを求め、それと極方向との外積ベクトルを求めるとそれが射影になるという方法です。)
これによって速度についてもかなり改善がありました(同時観測の各カメラから求める観測速度のばらつきが減ったということです)
ところが、それでもまだ無視できないばらつきが存在します。それはeの計算が特異点を持つため、いくら精度が高くてもきりがないという問題も関係しています。
で、次にやったことは、経路平面内での観測点の間隔のばらつきの低減です。これは極による方向補正後の観測方向を開始部分と終了部分について時間軸上で補間して
その補間曲線上で開始時刻と終了時刻に対応する座標を求めるというとものです。
これは、開始点と終了点に含まれている極方向と直行する成分つまり流星の進行方向の誤差を他の観測点から補正することを意味しています。これが現状の3段階分析方法です。
(より、細かくはさらにいくかつの注意点があります、例えば、経路方向から、補間対象を Ra とするか Dec とするかまず決定し、それに基づいて時間軸上補間をする などです)
元々、現在の観測誤差の根源は各フレームでの光芒の中心位置計算誤差にあります。それはビデオの解像度とダイナミックレンジでは避けられないものです。
これを多数フレームの情報を用いていかに減らすかという点が問題なわけです。
最小自乗法により極を求めることによって、極と直交する方向の誤差成分については減らすことができ、これは昔から似たような補正がやられていたと思います。
しかし、直交方向だけ補正して、進行方向を補正しないというのは片手落ちと感じ、UA2ではそれに加えて進行方向の誤差も低減をおこなうことにしたわけです。
この方法はtUm発見の頃の実例を集めて実験によりできるだけ安定した結果が出るようにしたものです。当時としては最善を尽くしたつもりですが、当時の実例は今にくらべれば必ずしも多くはなく、現状で再度実例を集めればより良い方法が見つかる可能性もあるかと思います。また、元の誤差が極めて大きい以上、どのような方法も完璧ではなく、特に、短い流星では必ずしもこのような誤差低減方法が有効に機能しない場合もあるかと思っています。
尚、この問題の本質的な解決は、将来、より高解像度になったり、16ビット明度になったり、長焦点レンズでの観測が一般化した時ではないかと思っています。その時には分析方法も全面的に見直し、格段の精度向上ができるのではないかと思っています。
と、こんなところでよろしいでしょうか 
-----
あ、えーと、自分で読み直してみたら、csvに格納しているのが第二段階の結果だったか、第三段階の結果だったか、自信がなくなってきました。角速度算出のために第三段階までやったやのの、結局、角速度はその後の分析では使用しないこととなり、V2では始点、終点の3次元位置を求めて速度を出すように変更になっています。csvに書いているのは、もしかしたら、第二段間で極で補正した値そのままだったかもしれません。少なくとも、短い流星についてはその筈です。第三段階は、充分な長さがある時にだけやった筈です。
ウロ覚えでもうしわけないです。必要ならソース見て確認します 
|
|
| トップに戻る |
|
|
前田
登録日: 2004.09.01
記事: 2957
所在地: Miyazai JAPAN (E131.4, N31.8)
|
| 日時: Sun Feb 07, 2010 9:39 am 記事の件名: 私も質問です。 |
|
|
前田です。
SonotaCoさんへ
上田さんの質問とはちがいますが、UCの出力ファイル関連で少し似ているので、
ここで、教えてください。
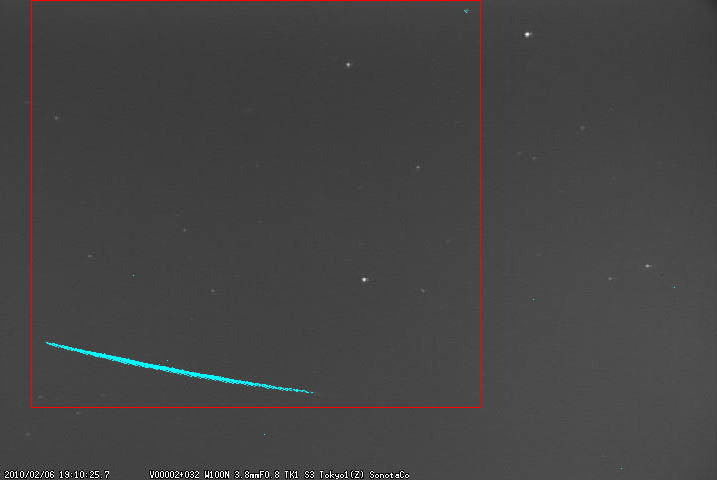
25mmレンズで観測していますが、この2ヶ月ぐらい、ノイズ(らしい)クリップが
急激に増えて(1時間に60個以上)きました。原因と対策を知りたいのです。
xmlファイルと、M.bmpを載せます。
特に何もないような画面で、detectがかかり続きます。
焦点距離が長いので、シンチレーション+カメラの強風による揺れを検出しているのか、
冬になって空がよくなって、全体の感度が上がりすぎてDetect Lev と Detect Sizeの設定が
悪くなったのかどちらかだと思っています。
しかし、シンチレーションマスクを最大にしても、Detect Levを126(通常は105以下)に
しても、症状が変わらないので、質問しました。
xmlファイルの中の下の表記でonoとpixelは、どういう意味ですか?
<uc_path fno="15" ono="18" pixel="2" bmax="20" x="115.0" y="202.5" />
なんとなく、後者の原因だと思うのですが。
| 説明: |
|
| ファイルサイズ: |
124.81 KB |
| 閲覧数: |
8151 回 |

|
| 説明: |
|

ダウンロード |
| ファイル名: |
M20100207_040344_MZ1_NH.xml |
| ファイルサイズ: |
12.63 KB |
| ダウンロード回数: |
870 回 |
|
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13558
所在地: 139.67E 35.65N
|
| 日時: Sun Feb 07, 2010 10:58 am 記事の件名: Re: 私も質問です。 |
|
|
| 前田 wrote: | xmlファイルの中の下の表記でonoとpixelは、どういう意味ですか?
<uc_path fno="15" ono="18" pixel="2" bmax="20" x="115.0" y="202.5" /> |
まずこの点から説明します。
前田さんの例だとどこが検出点か分かりにくいので、こちらの例で説明すると
以下で、
<uc_path fno="30" ono="17" pixel="2" bmax="30" x="314.5" y="293.0" />
となっているのは
fno: 第30フレーム( head指定値) の
ono: 第17オブジェクトで (これは内部的に循環で使用されるスローオブジェクトの監視番号で次のフレームと同じか否かにしか意味はありません)
pixel: 2つのピクセルが diff 指定値で指定されたフレーム数前のフレームから閾値以上に変化しており、
bmax: その変化量の最大値は 30 て
x: その点は 左から 314.5 ピクセル目
y: 上から293.0 ピクセル目 にあった
と読みます 大体下の流星位置の右端に対応していますよね。
前田さんの例だと 2つ同じonoが連続している2番目の x=415.5, y=39.0 がトリガ点だと思います。
これは、画面上部の 暗い恒星が風で揺れて伸びている所に対応しているようです。 どうも 風の揺れでシンチレーションマスクをはみ出したように思えます。
25mmレンズは 仰せのとおり、風に物凄く敏感で マウントの強化が大変ですね。
あと、xml で気になる点が1つあります。diffの値です。
最近発生するようになったというのは、 diff 設定値が以前 1 だったものを 2 に変えたということはないでしょうか。
diff は何フレーム前と差分をとって 変化を検出するかという重要なパラメータで、大きくすると変化に大変敏感になります。 流星観測では 1 が良いと思います。
| 説明: |
|
| ファイルサイズ: |
15.68 KB |
| 閲覧数: |
8142 回 |
|
| 説明: |
|
| ファイルサイズ: |
25.31 KB |
| 閲覧数: |
8142 回 |
|
| 説明: |
|
| ファイルサイズ: |
124.28 KB |
| 閲覧数: |
8142 回 |
|
|
|
| トップに戻る |
|
|
前田
登録日: 2004.09.01
記事: 2957
所在地: Miyazai JAPAN (E131.4, N31.8)
|
| 日時: Sun Feb 07, 2010 9:11 pm 記事の件名: ありがとうございます。 |
|
|
前田です。
SonotaCoさん、どうもです。とてもよくわかりました。bmaxはピクセルの最大値
ではなくて、平均値を引いた変化量だったんですね。今回の例では平均レベルは
23とあるので、DLratioを126にすると、23*(1.26-1)=6で、bmaxが6以上が
検出レベルですね。
diff=2について
これは、UCV0ではじめて使ったときにいろいろテストをした結果1より2の方が
流星の検出数が多かったので、2にしてそのままになっていました。
V2などを導入したときにデフォルトの1で観測しているカメラもありました。
もどして、テストしてみます。
数ヶ月前からというのは、やはり冬の季節風が強くなったためにカメラが振動
しやすくなったのだと思います。このカメラのハウジングは屋根よりやや高く
なっており、風の影響を受けやすくなっています。
最後に、xとyの値ですが、私のものは小数1位が0と5ですが、SonotaCoさん
の例では、それ以外の数も出現していますが、これは重心を取ったからですか。
|
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13558
所在地: 139.67E 35.65N
|
| 日時: Sun Feb 07, 2010 9:50 pm 記事の件名: Re: ありがとうございます。 |
|
|
| 前田 wrote: | bmaxはピクセルの最大値
ではなくて、平均値を引いた変化量だったんですね。今回の例では平均レベルは
23とあるので、DLratioを126にすると、23*(1.26-1)=6で、bmaxが6以上が
検出レベルですね。 |
えーと、ちょっと違います。(平均レベル 23 というのが どの数字のことだか分かっていませんが)
まず、前田さんのxml だと dlev="12" とあるので、bmax が 12 以上が検出対象になっています。
この時の 平均ノイズレベルは 12/1.26 で 9.5 程度だったと思われます。
で、bmax は 平均値との差ではなくdiff数前のフレームの同画素の明るさとの差です。
| 前田 wrote: |
最後に、xとyの値ですが、私のものは小数1位が0と5ですが、SonotaCoさん
の例では、それ以外の数も出現していますが、これは重心を取ったからですか。 |
この座標はその1つのスローオブジェクト領域内の検出点の単純平均値です。
(UFOAnalyzerでは光芒の重心をとりなおします)
あと、 diff は画角と仰角にも依存するので、度広角から超広角レンズでは 流星速度がとても遅くなるので、2 以上の方が良い場合があると思います。
|
|
| トップに戻る |
|
|
masuzawa
登録日: 2005.04.09
記事: 3983
所在地: SHIOJIRI
|
| 日時: Tue Feb 09, 2010 9:43 pm 記事の件名: 地上風景のマスク |
|
|
| SonotaCo wrote: | [余談ですが、最初の画像でシンチレーションマスクが下部の地上風景にも掛かっているのが惜しいと思います。
UFOCaptureV2の Detect AreaのEditで地上風景をマスクすると 誤検出が減り、動体検出感度も上がる場合があります。 夜、一度動画を表示させた後だと 風景をオーバーレイしながら 塗り絵感覚でマスクしていくことができます。地上風景を 数ビクセル大きめにマスクするのがお薦めです。カメラが動くとやり直しですが... |
上記はスプライト談話室からの転載です。 多忙中に質問で恐縮ですが・・
UFO Capture にて、地上風景のマスクをしなかった場合でも、UFO Analyzer にて地上風景をマスクすることはできないでしょうか?
晴れていると、地上風景によらずに参照星とのリンクが綺麗に取れますが、曇っていたりすると、地上風景にかかったシンチレーションマスクが災いして、参照星とのリンクが取れないことがあります。
クリップごとに地上風景をマスクすればよいのですが、大量にクリップがある場合に自動でできればいいと思うのですが。
また、電線などに付いたシンチレーションマスクが邪魔したりしますが、UFO Capture にて電線にマスクをかける(かなりの面積になりますので・・)と、流星の検出が落ちるような気もして試していません。
cdeg は cdeg < 0.05 まで追い込めますが、 rstar を改善する良い方法がないものかと試しているところです。
|
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13558
所在地: 139.67E 35.65N
|
| 日時: Wed Feb 10, 2010 8:59 am 記事の件名: Re: 地上風景のマスク |
|
|
| masuzawa wrote: | | SonotaCo wrote: | [余談ですが、最初の画像でシンチレーションマスクが下部の地上風景にも掛かっているのが惜しいと思います。
UFOCaptureV2の Detect AreaのEditで地上風景をマスクすると 誤検出が減り、動体検出感度も上がる場合があります。 夜、一度動画を表示させた後だと 風景をオーバーレイしながら 塗り絵感覚でマスクしていくことができます。地上風景を 数ビクセル大きめにマスクするのがお薦めです。カメラが動くとやり直しですが... |
上記はスプライト談話室からの転載です。 多忙中に質問で恐縮ですが・・
UFO Capture にて、地上風景のマスクをしなかった場合でも、UFO Analyzer にて地上風景をマスクすることはできないでしょうか?
晴れていると、地上風景によらずに参照星とのリンクが綺麗に取れますが、曇っていたりすると、地上風景にかかったシンチレーションマスクが災いして、参照星とのリンクが取れないことがあります。
クリップごとに地上風景をマスクすればよいのですが、大量にクリップがある場合に自動でできればいいと思うのですが。
また、電線などに付いたシンチレーションマスクが邪魔したりしますが、UFO Capture にて電線にマスクをかける(かなりの面積になりますので・・)と、流星の検出が落ちるような気もして試していません。
cdeg は cdeg < 0.05 まで追い込めますが、 rstar を改善する良い方法がないものかと試しているところです。 |
なるほど、 後から一括でマスクを変更する機能ですね。
たとえば、UFOCaptureがマスク用の画像を指定できるように、UA2も一括して追加する地上風景マスクを指定できるようにすることでよければ実現可能のような気もします。
基本機能に入れいつも有効にすることもできるし、Utyシートの中で必要な時に一括で処理することもできるような気もします。必要な時だけ処理する後者の方が普段の作業が複雑にならないので、ベターな気がします。
もちろん、本当はキャプチャ以前にちゃんとマスクしておくことが、誤検出を減らし、かつ動体検出感度も上げるので良いのですが、あとからやりたくなることもありそうですね。
メモに入れておきます。 5月まではちょっと猛烈に忙しそうなので、実現するにしてもかなり先になりそうですが.....
|
|
| トップに戻る |
|
|
|

