| 前のトピックを表示 :: 次のトピックを表示 |
| 投稿者 |
メッセージ |
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
|
| トップに戻る |
|
 |
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
 日時: Tue Feb 17, 2026 9:36 am 記事の件名: システム構成 日時: Tue Feb 17, 2026 9:36 am 記事の件名: システム構成 |
 |
|
IPカメラによるVISTAシステムの構成概要です。
1台のPCでCPUとSSDが十分な場合、最高4台までのIPCameraの同時動体監視ができます。
LANはPCがIPカメラにTCP/IP接続可能であれば構成は任意です。
IPカメラの接続方法には 有線LAN接続/Wifi接続/インタネット経由での接続の3通りがありますが、一般的には有線LAN接続を推奨します( Wifi接続は安定性と信号遅延の問題があり定常観測には推奨されません)。
| 説明: |
|
| ファイルサイズ: |
78.92 KB |
| 閲覧数: |
3287 回 |

|
最終編集者 SonotaCo [ Tue Feb 24, 2026 7:54 am ], 編集回数 1 回 |
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Wed Feb 18, 2026 2:39 pm 記事の件名: ハードウェアの準備 |
|
|
【PC】
[簡単には]
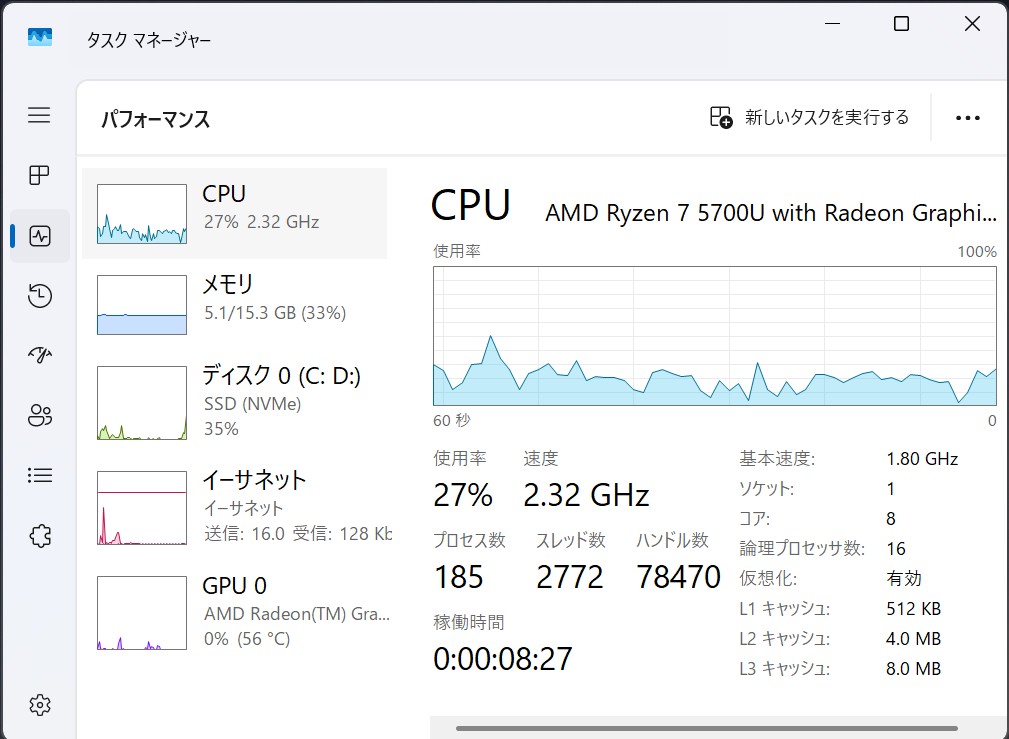
2560x1440/20fpsのIPカメラ1台であれば8スレッド 2.5GHz程度のノートPCで処理できます。
4カメラ同時処理用を想定する場合は8コア16スレッドで4.3GHz程度のクロックCPUをもつWindows PCを用意します。
M2 SSDを2枚内蔵できる機種で、Dドライブをキャプチャ専用として1TBまたは2TBのSSDを備えるものが理想的です。
メモリは16GB以上あれば十分です。
UFOシリーズやコーデック等のインストールのため、以下でWindowsのスマートアプリコントロールを無効に設定します。
https://sonotaco.jp/forum/viewtopic.php?p=87434#87434
[詳しくは]
1台のPCで最大4台までのカメラ入力が処理できますが、性能が不十分な場合、再生不可能な動画ファイルが記録されます。
一般的には UFOCapureのPCの要件は使用するカメラの復号後の動画の転送レート(R)の合計によって決まります。
Rは動画の解像度をX,Y, フレームレートをFとして R=X*Y*F*2 (Byte/sec) です。
代表的カメラのRは以下です。
C100 FHD15p: 1920*1080*15*2 = 60MB/s
C320WS QHD15p: 2560*1440*15*2 = 106MB/s
C325WBWS QHD20p: 2560*1440*20*2 = 141MB/s
C530WS 3K30p : 2880*1620*30*2 = 267MB/s
C560WS 4K25p : 3980*2160*25*2 = 410MB/s
例えば、QHD15p,QHD20p,4K25pを1台のPCで処理する場合には合計のRは 106+141+410=657 MB/s です。
必要なCPUの性能は P = クロック(GHz)*スレッド数 (例えば AMD Ryzen7 8745H (3,8-4.9GHz, 8コア16スレッド)では P= 61 - 78 (GHz))によって計算し、
P(GHz) > 0.1*R(MB/s) 程度の性能が目安です。
具体的には上記の R= 657MB/s を1台で処理するには クロック 4.1GHz ,16スレッドのCPU (P=66GHz)以上のCPUが必要となります。
実際には この条件で Ryzen7 8745H はCPU負荷40%程度(UFOCaptureはReplayシート表示状態)で概ね安定して動作します。
一般にCPU負荷が50%を超えるとコマ落の可能性が高くなります。
ストレージは各カメラ各々がそのR以上の転送速度をもつ必要があります。
キャプチャ先となるドライブは事象発生時に即時に書き込み可能状態である必要があるため、シテスムのドライブとは物理的に別のドライブがよく、
カメラ毎に別のデハイスにすることが理想です。ストレージを別にしてもそれを接続するUSBやシステムバスが帯域がネックとなる場合もあります。
重要な同時イベントの発生確率は小さいので、同一ドライブでも事実上問題ない場合もあります。
イベントのクリップファイルは 2560x1440/20p 非圧縮の場合、短いイベントで 1イベント150MBほどの大きさになります。
一晩のイベント数は通常は数十以下ですが、流星群の極大夜では1000を超えることもあり、クリップキャプチャ先ディレクトリとして必要な大きさは150GB程になります(この大きさは解像度、フレームレートに比例します)。
(格納時にUtCodecなどの可逆圧縮コーデックを用いた場合にはその数分の一から10分の一程度まで削減できますが、記録されたクリップは当該コーデックがインストールされていないPCでは再生分析ができなくなります。)
有線LANは1口で十分です。IPカメラの通信量はカメラ1台あたり0.2-3Mbps程度です。
【IPカメラ】
VSTA-IP資料集などを参照して選択し、まずは1台用意します。https://sonotaco.jp/forum/viewtopic.php?t=6136
【LAN ケーブル/ハブ】
LANケーブルは屋外用(耐候性があるポリエチレン被覆)のもの。Cat6のものも比較的安価に販売されています。カメラとハブの設置場所を決めて十分な長さのケーブルを用意してください。15m程度までは問題ありません。。
POEを利用する場合にはPOE対応と記載のあるケーブルが必要です。
Tapoカメラは同軸端子に筒状の防水カバーが付属していて、説明書通りOリング等を挟んでコネクタ部を防水することができます。
必要な場合、LANのHubを増設してください。
【電源】
Toppo付属ACアダプタのケーブルは3m以上あり、DCプラグとカメラは付属の防水ゴムを挟んで接続します。耐候性を高めるためケーブルにカバーを付けるか、日光の直射があたらないような工夫のが望まれます。
長さが不足する場合にはACケーブルがDCケーブルを延長する必要があり、その場合には接続部の防水処理が必要です。。
POEを利用する場合にはPOE対応のハブを用いてLANケーブル1本で信号と電源が接続可能です。
POE非対応のカメラでもPOEスプリッタを使用するとPOEケーブルで電源供給できる場合があります。この場合IPカメラのDC端子に合う電圧とプラグ形状をもつPOEスプリッタ、およびそれらの防水処理が必要です。
【その他】
IPカメラ設置の場合には通常その設定のためのスマホまたはタブレット、そのスマホとカメラが接続可能なWifiまたは有線LANが必要です。
観測は有線LANが望まれますが、試験は近距離であればWifi (2.4GHz)で可能です。
| 説明: |
| QHD15p,QHD20p,4K25pの3カメラをRyzen7 8745H で処理している場合のCPU負荷 |
|
| ファイルサイズ: |
67.38 KB |
| 閲覧数: |
3514 回 |

|
| 説明: |
| QHD20pのカメラをR7 5700UのノートPCで処理しているときの負荷 |
|
| ファイルサイズ: |
123.16 KB |
| 閲覧数: |
2788 回 |
|
最終編集者 SonotaCo [ Wed Mar 25, 2026 6:46 am ], 編集回数 13 回 |
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Thu Feb 19, 2026 5:26 pm 記事の件名: カメラの設定 |
|
|
【カメラ設定アプリのスマホへのインストール】
設置するカメラに応じてその専用アプリ (Tapo カメラの場合 "TP-Link Tapo" )
を Google Play(Android)または App Store(iphone)からスマホ(またはタブレット)にインストールしてください。
【カメラの接続 と カメラ専用アプリによる設定】
アプリを起動し、アプリの指示に従ってカメラとスマホを接続してください。(両者が同一のWifiまたは有線LANに接続可能であることが必要です。)
初回はカメラとスマホを近くに置き、アプリからBlueTooth によってカメラを発見しカメラ側の設定が可能になります。
最初からLANケーブルでネットワークに繋いておくとWifi設定を省略できます。
カメラとアプリが接続されるとカメラからの動画が表示でき、設定が可能になります。
初回にTapoアプリ上の名称入力やファームウェアアップデートなどを行います。
VISTA観測に必要なカメラの設定は
1.有線LAN接続で固定IPアドレスを設定にすること
2.夜間の動作モード(カラーまたはIR)を所望なものに設定し、カメラの人物認識機能や通知機能はすべてオフにする
3.RTSPを有効にし、RTSP用のユーザ名とパスワード設定する
の3つです。具体的には以下の手順です。
1. ネットワーク設定
アプリの指示に従ってカメラをWifiまたは有線LANに接続します。
LANでDHCPサーバーが機能していれば、自動的にIPアドレスが接続され通信可能になります。
RTSP接続ではカメラのIPアドレスをUFOCapture側に指定することが必要なため、カメラのIPアドレスの固定が可能な機種では、固定IPを設定しておくことを推奨します。
固定IPの設定にはある程度LANの知識が必要ですが、固定によりアドレスが変化することがなくなり、パケットフィルタ等を設定することも容易になります。
以下にサンプル例を示しておきます(インタネットルーター(ゲートウェイ)のアドレスが192.168.0.1であり、192.168.0.22x付近のアドレスは空いてるという例です)
2.デバイス設定
カメラによって人物や車両の検知機能、通知などは総べてオフにします。
カメラの夜間の動作モード(カラーかIRか)、画質などを設定します。
フレームレートの選択可能であればできるだけ大きいものを選択します。
(C520WS,C530WSは仕様表では30fpsまで可能と記載されていましたが、ファームアップデート後は最高25fpsとなっているので25fpsを選択します)
3.RTSP接続のためのアカウント設定
RTSP接続時に使用するユーザ名とパスワードを設定します。通常設定前にセキュリティ上の同意を求められます。
以上の設定より tapoカメラの場合、例えば以下のようなurlでRTSP接続可能となります。(アドレス、ユーザ名、パスワードはカメラに設定したものを指定します, 554はポート番号 で メーカーにより違う可能性があります)
rtsp://tapouser1:xxxPASSWORDxxxx@192.168.0.232:554/stream1
このURLはメーカーにより書式や最後のストリーム名が異なるので各々のメーカの資料を参照してください。
| 説明: |
|
| ファイルサイズ: |
191.53 KB |
| 閲覧数: |
3437 回 |

|
| 説明: |
|
| ファイルサイズ: |
60.67 KB |
| 閲覧数: |
3437 回 |

|
| 説明: |
|
| ファイルサイズ: |
154.82 KB |
| 閲覧数: |
3437 回 |

|
| 説明: |
|
| ファイルサイズ: |
87.71 KB |
| 閲覧数: |
3437 回 |

|
最終編集者 SonotaCo [ Sat Feb 21, 2026 5:01 am ], 編集回数 10 回 |
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Thu Feb 19, 2026 5:59 pm 記事の件名: カメラのテスト |
|
|
【映像確認/簡易設定用ソフトのインストール】
多くのカメラはONVIFという汎用のIPカメラ接続表示用インタフェースをサポートしており、
これを用いた以下のようなフリーソフトが多数公開されています。
ODM https://sourceforge.net/projects/onvifdm/ (4Kは動画表示未対応)
iSpy
IP CNTCOM
これらはアクセス可能な範囲にあるIPカメラを探索し、そのアドレスや接続方法を自動取得して自動的に接続する機能を持っています。
これらを用いることにより、自分のネットワーク内カメラのIPアドレスを調べ表示したり簡単な項目の設定をしたりすることができます。
RTSPのurlが判明している場合には汎用動画表示ソフトである
VLCメディアプレヤーhttps://forest.watch.impress.co.jp/library/software/vlcmedia_ply/ が使用できます。
【RTSP経由でのPCでの表示テスト】
ODMとVLCメディアプレーヤーはWindows上でも動作するので、これらで IPカメラ設定により決定したカメラのRTSPのURLを指定して
そのPCでRTSPの受信と動画表示ができることが確認できます。UFOCaptureでの受信の前に是非これらで確認しましょう。
【カメラ設置】
カメラを屋外に架台に設置し、配線をし、配信される動画をみてカメラの方向を確認します。
この時、カメラのライトにテープなどを貼り光が外部に漏れないようにしてください(昆虫のキャプチャを減らすため)。
カメラのライトは強烈なので、このテープはビニールテープなどでは光が通り、雨の夜に雨滴が沢山キャプチャされてしまいます。ある程度しっかりした遮光性のあるものが必要ですが、パンチルト付きカメラだと厚過ぎると障害になります。
(C325WBは完全消灯可能なのですが、殆どのカメラでは消す方法が無いようです)
| 説明: |
|
| ファイルサイズ: |
195.07 KB |
| 閲覧数: |
3428 回 |

|
| 説明: |
|
| ファイルサイズ: |
255.2 KB |
| 閲覧数: |
3428 回 |

|
| 説明: |
ODMによるIPカメラ群の表示
自分のネットワークを検索してくれます |
|
| ファイルサイズ: |
266.86 KB |
| 閲覧数: |
3427 回 |

|
最終編集者 SonotaCo [ Wed Feb 25, 2026 7:34 am ], 編集回数 1 回 |
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Wed Feb 25, 2026 7:07 am 記事の件名: PCの設定 |
|
|
1.UFOシリーズのプログラム配置用ディレクトリとして UFOディレクトリ C:\UFO を作成します。後にここにUFOシリーズのパッケージを配置します。
2.十分な速度と容量を持つドライブ(内蔵 M2 SSD 2TBなど)に カメラ毎キャプチャ先として D:\Cap\R1 などのディレクトリを作成します。ここをUFOCaptureのDBシートの"DB dir"に指定します。
このディレクトリはシステムドライブとは別のデバイスが望ましく、そのドライブではWindowsのインデックス作成や、リアルタイム保護(ウイルスチェック)、自動バックアップなどが発生しないようにWindowsを設定する必要があります。
コントロールパネル > インデックスのオプションで キャプチャ先ドライブがインデックス作成状態の場合にはその設定を削除します。
設定 > プライバシートセキュリティ > Windows セキュリティ > ウイルスの脅威と防止 > ウイルスと脅威の防止の設定 > 除外 にキャプチャ先ディレクトリ(D:\capなど)を"除外の追加"で指定する
自動バックアップを指定している場合にはキャプチャ先ディレクトリを除外する
また、ごみ箱のプロパティでそのドライブは削除と同時にファイルを消去する設定にしておくと、クリップの大量削除等が高速にできます。
同時発生イベントで不良が発生して問題になる場合、カメラ毎に別デバイスとする必要があります。
3.時刻校正設定
以下の設定をして10分毎にPCの時計が補正されるようにします。
Windowツール >サービス で Windows Time を 自動(遅延開始) に設定する
コントロールパネル > 日付と時刻 >インターネット時刻 > 設定の変更 で インターネット時刻サーバーと同期するをチェックして サーバーに ntp.nict.jp を指定する
Windowツール > regedit で以下を設定する
HKEY_LOCAL_MACHINE System CurrentControlSet Services W32Time TimeProviders NtpClient の SpecialPollInterval を 600 にする
HKEY_LOCAL_MACHINE System CurrentControlSet Services W32Time Config UpdateInterval を600にする
PCを再起動して10分後以降に コントロールパネル > 日付と時刻 >インターネット時刻 で "... と同期しました" と表示されているのを確認する
4.電源設定
コントロールパネル > 電源オプション > プラン設定の変更 >コンピューターをスリープ状態にする を "適用しない" に設定する
コントロールパネル > 電源オプション > プラン設定の変更 > 詳細な電源設定の変更 > ハードディスク > 次の時間が経過後ハードディスクの電源を切る を 0分に設定する
5.Windowsのスマート アプリ コントロールの設定
各種プログラムがスマートコントロールの対象となって実行できない可能性があるので以下でスマート アプリ コントロールの設定を解除します。
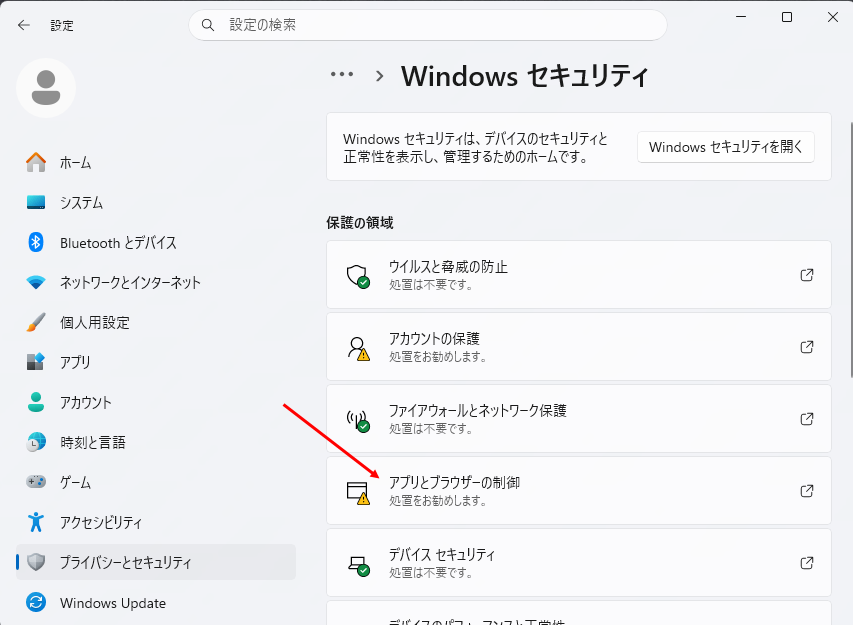
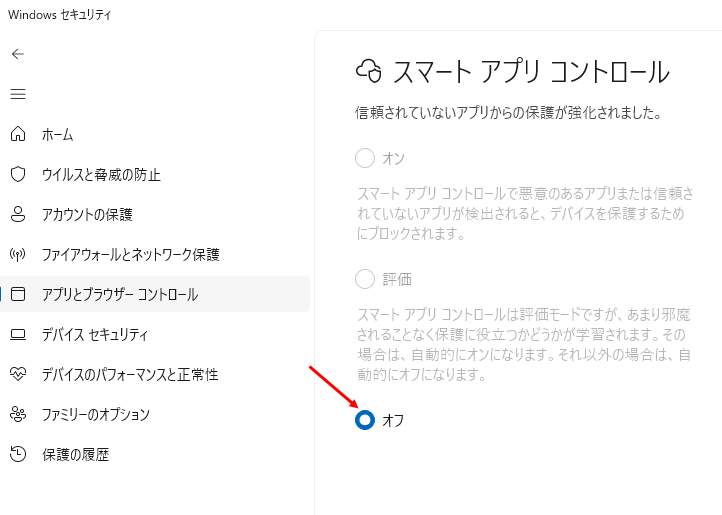
設定>プライバシーとセキュリティ>Windows セキュリティ>アプリとブラウザー コントロール 「スマート アプリ コントロールの設定」をクリックし、「オフ」を選択
最終編集者 SonotaCo [ Mon Mar 09, 2026 7:31 am ], 編集回数 3 回 |
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Wed Feb 25, 2026 7:20 am 記事の件名: 必須ソフトウェアの準備 |
|
|
0.VC_redistパッケージ(Microsoft Visual C++ v14 再頒布可能パッケージ x64版をインストールしたことのないPCで1回だけ必要)
0-1 以下のページ下部の Redistributables から Microsoft Visual C++ v14 再頒布可能パッケージ x64版をダウンロードする
https://visualstudio.microsoft.com/ja/downloads/
0-2 エクスプローラーでダウンロードした VC_redist.x64.exeのプロパティを示し、下部のセキュリティにある"許可する"のチェックボックスをオンにしてOKを押す
0-3 VC_redist.x64.exeをクリックして実行する
1.UFOCaptureIP
1-1 https://sonotaco.com/soft/index.htmlより UFOCaptureIPをダウンロードする
1-2 ダウンロードしたzipファイルのプロパティを開き、下部のセキャリティの許可チェックボックスをオンにする
1-3 zipファイルを解凍する
1-4 解凍されて出来たUFOCapディレクトリをC:\UFOに移動する
1-5 複数カメラを処理する場合、カメラ台数分のディレクトリをカメラ名に応じたC:\UFO\UFOCap_R1などとしてUFOCapディレクトリを複数作る
1-6 どれか1つのUFOCapディレクトリでUFOCap_REG.exeを実行しする
1-6-1 Licence IDとLicence keyを入力し、"Register"ボタンを押しライセンス登録をする。
1-6-2 ReInstall.axボタンを押しシステムにaxモジュールを登録する。
2.RTSPソースフィルタ/デコーダー
RTSPソースフィルタ/デコーダーはDirectShow対応のモジュールが複数存在し、利用できる可能性があります。
現在までに以下のLAV Filtersが新UFOCaptureでの動作確認が済んでいます。
[LAV Filters (RTSPソースフィルタとH264等のビデオとオーディオデコーダーのパッケージで、すべて一度でインストールできます)]
2-1 以下のページから"LAVFilters-x.xx-インストーラー.exe"をダウンロードする
https://github.com/nevcairiel/lavfilters/releases
2-2 エクスプローラーでダウンロードしたexeのプロパティを表示し、下部のセキュリティにある"許可する"のチェックボックスをオンにしてOKを押す
2-3 LAVFileters-x.xx-installerexeを実行しすべてのチェックボックスはデフォルトのままインストールする
2-4 WindowsのスタートメニューのLAV FiltersからLAV Video Configurationを起動する
2-5 LAV Video ConfigurationのVideo SettingsシートのOutput Formatsで 8bitのYUY2のみチェックボックスオンにし、他のチェックボックスはオフにする
| 説明: |
| LAV Video Configuration での出力フォーマット設定 |
|
| ファイルサイズ: |
241.19 KB |
| 閲覧数: |
3257 回 |

|
最終編集者 SonotaCo [ Wed Mar 25, 2026 12:15 pm ], 編集回数 7 回 |
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Wed Feb 25, 2026 12:43 pm 記事の件名: UFOCaptureの設定とテスト - - 基本設定 |
|
|
UFOCapture を起動し以下の基本設定をします。
基本設定後、PreviewおよびDetectが可能になります。
以下、赤線部が最初の必須設定、緑線が実環境で調整が必要な設定、橙線は任意の設定です。
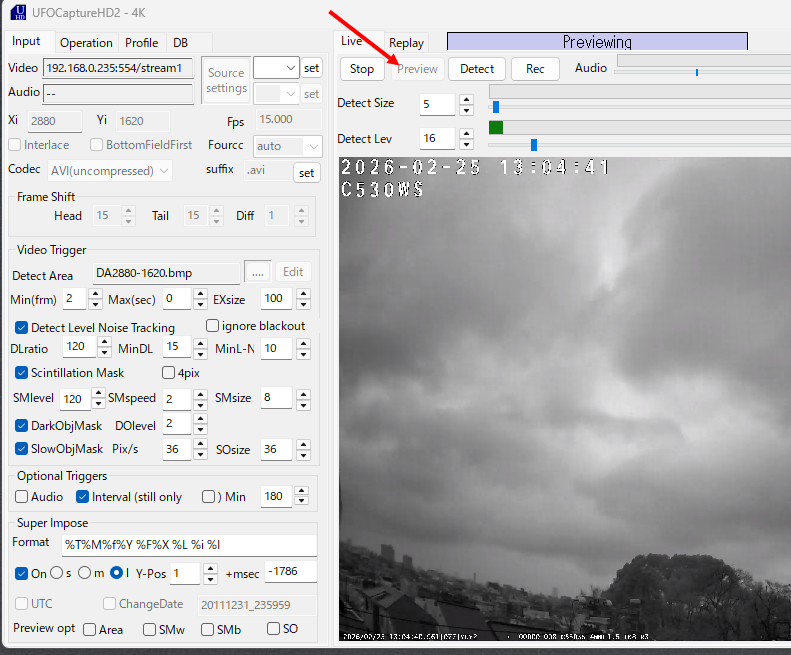
- - - Inputシート (一番下の図)
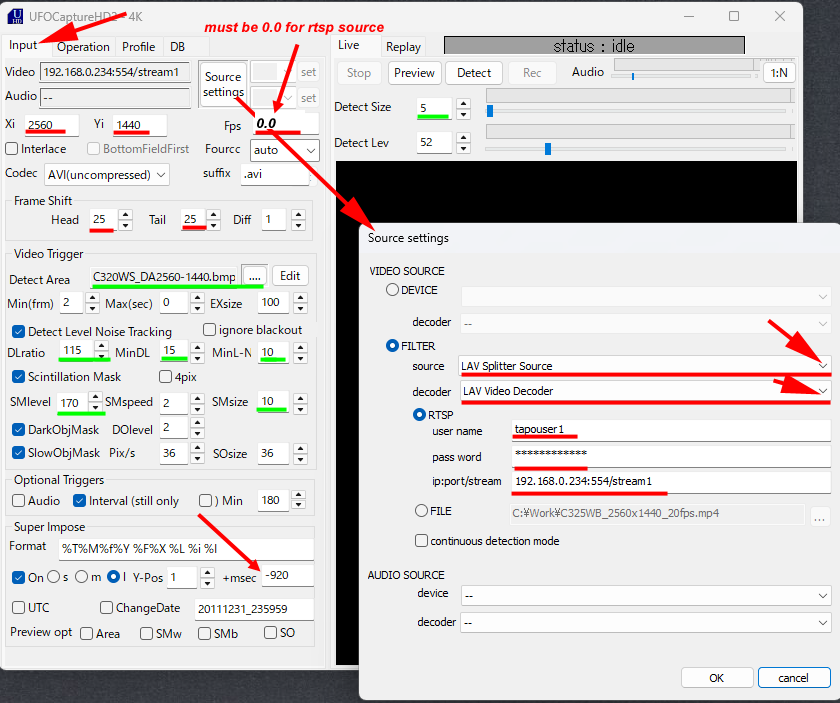
最初に "Source settings"を押し、Source settings ダイアログで入力の設定をします。
RTSP入力の場合は、FILTERを選択し、所定のフィルタ(現状では source で LAV Splitter Source、 decoderでLAV Video Decoder )を選択します。
ついで、RTSPを選択し、カメラのアカウントで設定した user name, pass word, IPアドレス:ポート番号/ストリーム名を入力します(passwordは空欄での入力時にのみ可読表示され、以降は暗号化して保存されるため、見ることができません)。OKボタンをおすと Inputシート Video蘭にIPアドレスなどが表示されます
V5.02から "use RTSPT"チェックボックスが追加され、デォルトでオンに設定されています。use RTSPTがオンの場合、RTSP受信時に "rtsp://" ではなく "rtspt://"で始まるurlを使用します。これはLAV splitter source入力フィルタに対して有効で、TCP転送を指定するもので、通信の安定性を向上させることができ、Hisilicon社製DSPなどからの信号の受信を可能にし、Wifi接続やリモートデスクトップにおいて安定性を向上させます。LAV filters以外のRTSP入力フィルタやTCP転送に対応していないカメラを使用する場合はオフに前提してください。
次に、選択したカメラの解像度を Xi,Yi,Fpsに設定します。
fpsには固定フレームレートのカメラではカメラのfpsを設定し、RTSP経由のカメラなど可変フレームレートカメラを使用する場合には "0.0" を設定してください。0.0の場合、UFOCaptureによってフレームレートの概算値が実測され、出力に反映されます。
HeadとTailは 固定フレームレートカメラではfps設定値に近い整数を指定します。
fpsに0.0を指定した場合には10 から 30程度の間で、実際のトリガ前部分が1秒程度になるように調整してください。
他の項目は実動画表示後設定調整します。
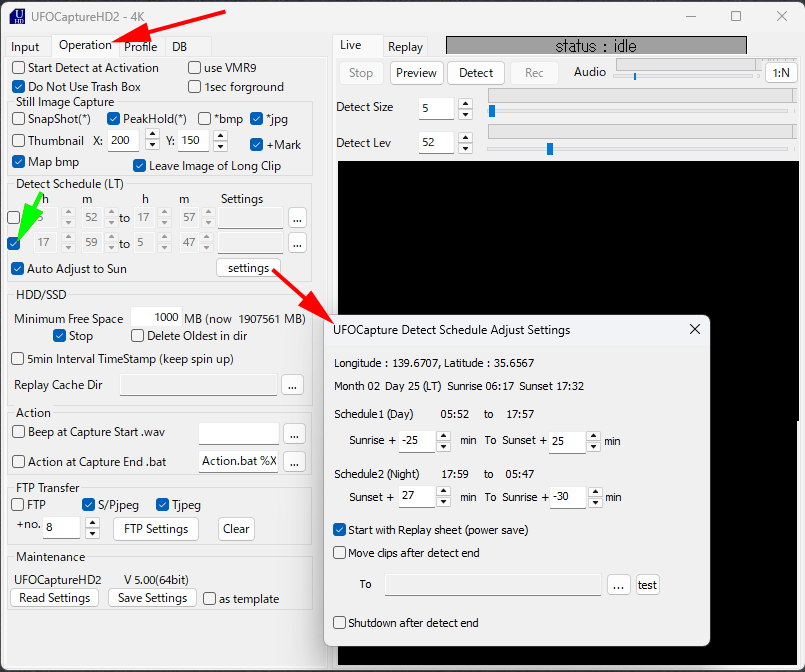
- - - Operationシート
当初はデフォルト設定のままでOKです。後にスケジュールをオンにします。
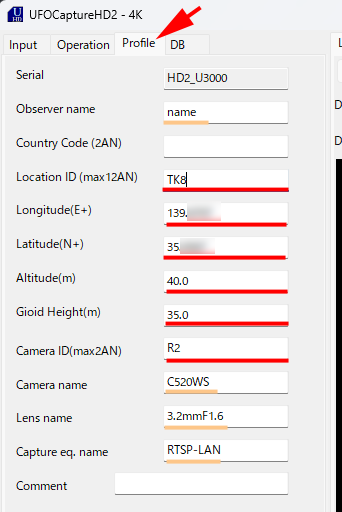
- - - Profileシート
カメラのフロファイルを設定します。LocationIDは外部にデータ公開する場合に必要で、以下のSonotaCo Network Forumで申請した独自のものを使用します(3文字または4文字の略号 "TK8" などが便利です)。
https://sonotaco.jp/forum/viewtopic.php?t=197
CameraIDは3文字までで、任意に決めることができます。
緯度経度は度の10進小数点表記で入力します(度分秒表現ではありません)
以下の地理院地図でカメラ位置をクリックし、上部のアドレスバー表示に含まれる緯度経度の10進小数点表記を少数点4桁まで読み取り
経度(139.xxxxなど)をLongitudeに 緯度(35.xxxxなど)をLatitude に設定します。
https://maps.gsi.go.jp/
同時に画面下部にその地点の標高(m)が表示されているのでこれを Altitude に設定します。
次に以下のページで上記で得た緯度経度を用いてその地点のジオイド高を計算させ、Gioid Heightに設定します(日本付近は概ね20mから40m程です)。
https://vldb.gsi.go.jp/sokuchi/surveycalc/geoid/calcgh/calcframe.html
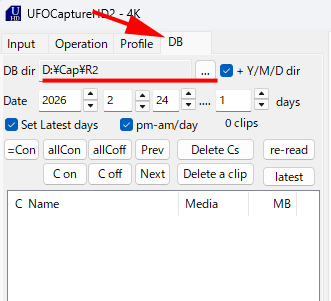
- - - DBシート
DBシートではクリップのキャプチャ先となるキャプチャディレクトリ を指定します。
指定ディレクトリの下に年、月、日のディレクトリが自動作成されます。
- - 表示/録画テスト
以上の設定が終わったら、UFOCapture右上の×ボタン押して一度終了し、設定を記憶させます。
以降、IPカメラが動作していれば UFOCaptureを起動しLive シート Preview ボタンを押すとカメラ動画が表示されます。
Preview状態で、Recボタンを押すと録画が開始され、再度 Recボタン( Rec-offとなっている)をおすと、1秒程度あとに 録画が停止します。録画されたクリップはDBシートに表示され、Replayシートで見ることができます。
| 説明: |
| Inputシートの設定例(RTSP C520WS) |
|
| ファイルサイズ: |
117.61 KB |
| 閲覧数: |
2331 回 |
|
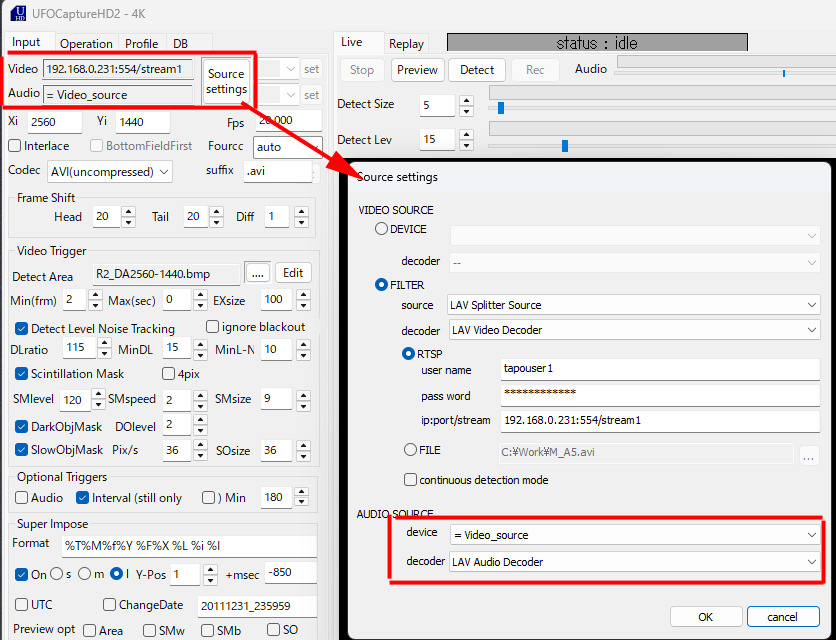
| 説明: |
| Inputシートの設定例(RTSP IPカメラからの音声付きとする場合) |
|
| ファイルサイズ: |
95.8 KB |
| 閲覧数: |
2331 回 |
|
| 説明: |
|
| ファイルサイズ: |
101.83 KB |
| 閲覧数: |
2331 回 |
|
| 説明: |
|
| ファイルサイズ: |
78.17 KB |
| 閲覧数: |
2331 回 |
|
| 説明: |
|
| ファイルサイズ: |
30.2 KB |
| 閲覧数: |
2331 回 |
|
| 説明: |
|
| ファイルサイズ: |
16.97 KB |
| 閲覧数: |
2331 回 |
|
| 説明: |
|
| ファイルサイズ: |
223.43 KB |
| 閲覧数: |
2331 回 |
|
| 説明: |
| V5.02で追加された"use RTSPT"チェックボックス |
|
| ファイルサイズ: |
40.35 KB |
| 閲覧数: |
1155 回 |

|
最終編集者 SonotaCo [ Fri May 08, 2026 1:28 pm ], 編集回数 8 回 |
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Wed Feb 25, 2026 3:51 pm 記事の件名: UFOCapture 設定調整 |
|
|
【領域マスク設定】
Area mask (領域マスク) は地上風景や屋根のひさし、カメラによるスーパーインポーズ表示部分などの動体監視の対象としたくない部分を画像によりマスク指定し、その中の変化を無視し、その中のシンチレーションマスクを無効とするための機能です。
一旦 Preview状態とし、Stopして視野の静止画が表示されている状態で マスクエディタを起動することによって、実際の視野の画像に重畳表示してマスク画像の作成作業ができます。
マスクエディタでは Detect色、Mask色を長方形、直線、ドットによって画面に塗り、不要部分をカバーするようにします。この時、やや大きめにマスクすることによってシンチレーションマスクが不要部分にかかって誤った恒星マッチングをすることを防ぐことができます。また風に揺れる樹木等は揺れる範囲を含んで大きめにマスクする必要があります。setボタンによって明度差で自動セットし、手動補正することもできます。
電柱や電線、屋根のひさしなど通常発光しない風景も車のヘッドライトに照らされて光ることなどがあり、マスクしておくことが必要です。
【シンチレーションマスク設定】
シンチレーションマスクとは夜空の恒星の瞬きをマスクして検出に影響しないようにすることによって動体検出感度を上げるものです。
これはリアルタイムに動画各画素の一定時間の平均明度を求め、周囲より明るい部分をその周辺を含めてマスクしてその中の変化を検出から除外します。
これにより恒星の瞬きより暗い流星による変化を捉えることができます。
この設定はよく晴れた夜、Preview状態として、Inputシート下部のPreview optionのSMwをオンに設定するとで画面内の恒星位置に白色のマスクがかかる様子さ確認することができます。
はその感度をInputシート、Scintillation Mask部のSMlevelで調整することができます。
SMlevelを上げるとシンチレーションマスクが増え、SMlevelを上げるとシンチレーションマスクが減ります。
SMlevelはカメラとそのモードに応じて実際の夜空で必ず調整してください。
通常の夜空で画面内に数十から100個程度のマスクとなるように調整します。数個では少なすぎ、数100個では多過ぎます。
画面内に領域マスクされていない恒星以外の明るい部分がある場合、そこにもシンチレーションマスクがかかることがあります。
これは後の分析の障害となるため、そのような部分がないように領域マスクを設定してください。
尚、赤色巨星などで、マスクサイズが不足する場合にはSMsizeを上げ、フレームレートが遅いカメラではSMspeedを上げます。これらはマスクの状態を見て適宜調整してください。
画面内の明度変化はLiveシートのDetect Levのバーで見ることができます。左端が0で右端が255です。
シンチレーションマスクが不十分な場合LiveシートのDetect Levのバーは大きく(100程度)バタつき変動しますが、マスクが良好に設定されれば通常は10-20程度の変動に治まります。
シンチレーションマスクを設定してもDetect Levが数10以上の幅で変動する場合、画面内のどこかに原因があるので、それを調査してください。
UFOCaptureIP V5.05で SMlevelの自動調整機能が追加されました。以下の補足説明を参照してください
https://sonotaco.jp/forum/viewtopic.php?p=88128#88128
【動体検出感度設定】
画面内の明度変化は、Detect Lev設定値以上の明度変化をもつピクセル数がDetect Sizeを超え、それがMin(frm)以上継続した場合に動体として検出されます。
ただし、SlowObjMaskによって設定された移動速度以下の対象(飛行機など)はトラッキングされ、検出の対象から除外され、暗くなる方向の変化(鳥類など)はDarkObjMaskによって除外されます。
検出感度の調整項目は以下です。観測目的と検出数に応じて調整します。
DLratio : Detect Lev をノイズレベルの何%上に自動調整するかという100分率で、通常ノイズによるDetect Levのバタつきを無視するように 110から120程度に設定します。
MinDL: Detect Levの最低値で、通常 10から20程度に設定し、あまり調整の必要はありません。連続録画状態となる場合に上げてください。
MinL-N Detect Levと平均ノイズレベルとの差の最低値で、連続録画とならないように 通常10-30程度に設定します。
Min(frm) : イベントの変化継続の最低フレーム数です。2または3が普通です。
Detect Size 検出対象の変化ピクセル数の下限を設定します。検出数に大きな影響があります。レンズがシャープな非圧縮カメラでは2または3に設定します。動画圧縮カメラなどでは5以上が良いようです。
【宇宙線ノイズ対策】
IPカメラはH264/265圧縮の影響で、突発光の時間が延ばされるため、宇宙線ノイズを検出しやすくなります。ノイズの対処は UFOCaptureIPのInputシートの Min(frm)で行います。
デフルト値 2 (2フレーム以上継続する変化のみ検出)でこのままだとIPカメラでは多数の宇宙線ノイズを検出します。
これを減らすためには、短い流星キャプチャも減りますが Min(frm)の設定を3以上にします。
| 説明: |
| Preview > Stop > Edit を押下して マスクエディタを起動します |
|
| ファイルサイズ: |
241.3 KB |
| 閲覧数: |
3190 回 |

|
| 説明: |
|
| ファイルサイズ: |
208.42 KB |
| 閲覧数: |
3190 回 |

|
| 説明: |
| 不要部分を大きめにMask色で塗りつぶし、Saveボタンを押し手保存します |
|
| ファイルサイズ: |
212.92 KB |
| 閲覧数: |
3190 回 |

|
| 説明: |
| Detext Area に作成したマスク画像名が表示され、Preview OptionのAreaをオンにすると動画にマスクを重畳して見てみることができます |
|
| ファイルサイズ: |
184.72 KB |
| 閲覧数: |
3190 回 |

|
| 説明: |
シンチレーションマスク調整例
この程度がちょうど良いです |
|
| ファイルサイズ: |
746.39 KB |
| 閲覧数: |
3043 回 |

|
| 説明: |
シンチレーションマスク調整例
少な目ですが、この程度は比較星が欲しいです |
|
| ファイルサイズ: |
443.72 KB |
| 閲覧数: |
3043 回 |

|
| 説明: |
シンチレーションマスクが多すぎます
マスク部分は流星を検出しないので、
SMlevelを上げて数を減らした方がいいです。 |
|
| ファイルサイズ: |
715.45 KB |
| 閲覧数: |
3043 回 |

|
最終編集者 SonotaCo [ Thu May 14, 2026 7:52 pm ], 編集回数 3 回 |
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Thu Feb 26, 2026 3:47 pm 記事の件名: フレームレートの確認と遅延時間の設定 |
|
|
IPカメラではフレームレートが可変のものもあり、仕様に15/20/25/30fps と記載されていても 実際には 15/20/25 fosしか選択できない機種もあります。
ということで、実際のプレームレート確認する必要があります。
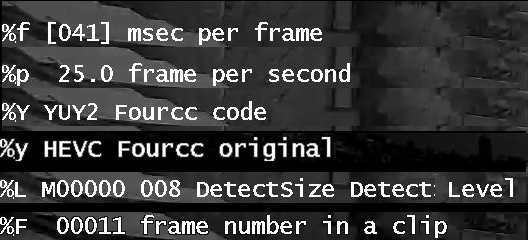
確認は、UFOCaptureでコマ送りにしてスーパーインポーズの時刻とフレーム番号で行います。
以下はC560WS 15フレーム設定の日中の動画のカメラのスーパーインポーズの秒の変わり目のフレームの様子です。
カメラのスーパーインポーズで 14:51:42秒の1秒間は UFOCaptureのスートーインポーズの0015から0029の15個のフレームなので、15fpsということが分かります。
夜間のクリップではこのカメラはなんと 9fpsでしたが、日中は指定の15fpsであることが分かります。
次に、カメラのスーパーインポーズ時刻とUFOCaptureのスーパインポーズ時刻の差ですか、この例ではカメラの 14:51:42秒は PCの14:51:43.652 なので、約1.6秒の差があります。
この差は IPカメラ処理時間、RTSP転送時間、IPカメラの時刻の誤差、PC内部処理時間 などの合計です。
このカメラで実験した所、この差は0.4秒から2秒程度までばらつきました。カメラの時刻補正感覚が長く、1秒程度の時刻誤差があるとすると説明できると思います。
何度かこの作業を繰り返し、平均的なカメラ時刻の遅れが判明したら、その差を UFOCaptureHS2 Inputシートの +msec に指定するとカメラノスーパーインポーズ時刻とUFOCapureのスーパーインポーズ時刻の差を小さくすることができ、カメラ側でのスーパーインポーズをオフにして観測領域広げることができます。
Tokyo8の4つのTapoカメラで何度か調べた所、msec に -800 程度を指定するのがよさそうでした。
----------------------------
フレームレート問題についてはとりあえず、以下の対応をとることになりました。
-- UFOCaptureでRTSPプロトコルで到達した信号について、PC時計を用いてプレームレートを実測し、この情報をUFOCapture出力のxmlに残すとともに、格納されるAVIファイルのヘッダに実測値のフレームレート情報を格納する
これは、RTSPによってPCに入力されるフレームレート情報はカメラ設定値のもので、フレームレートが自動低下した場合も元の設定値のまま変化しないため、クリップ毎の実測以外に真のフレームレートを知る方法が無いためです。
この対応によって、UA4側で将来フレームレート低下に対する補正などの処理が可能になります。合わせて蓄積されるクリップには実際のフレームレートが記載されるため、Windowsエクスプローラのプロファイル表示等で実際のフレームレートを知ることができ、別ソフトでの再生時にも実際の速度でプレイバック可能になります。
| 説明: |
|
| ファイルサイズ: |
226.32 KB |
| 閲覧数: |
3125 回 |

|
| 説明: |
|
| ファイルサイズ: |
174.21 KB |
| 閲覧数: |
3125 回 |

|
|
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Sun Mar 15, 2026 10:45 am 記事の件名: 再圧縮用の可逆圧縮コーデック |
|
|
UFOCaptureIPはRTSP入力時には動画の圧縮を復元し、検出したイベントはデフォルトでは非圧縮動画(YUY2)として記録します。これは分析時の再復号化を避けるためですが、記録容量としては大きくなります。
このクリップ保存容量を小さくしたい場合には、可逆圧縮コーデックを指定することによりIPカメラ内で一度圧縮されている動画は、再可逆圧縮の効果も大きく、保存容量を1/10程度に小さくすることができます。
可逆圧縮コーデックを使用したクリップもそのコーデックがインストールされているPCではUA4分析可能です。
ただしUA4分析時に並列処理が行われないため、分析時間は数倍から10倍程度に伸びます。
可逆圧縮コーデックは色々な相性問題もあり、UFOCaptureIP状での再生表示ができないものなどがあります。
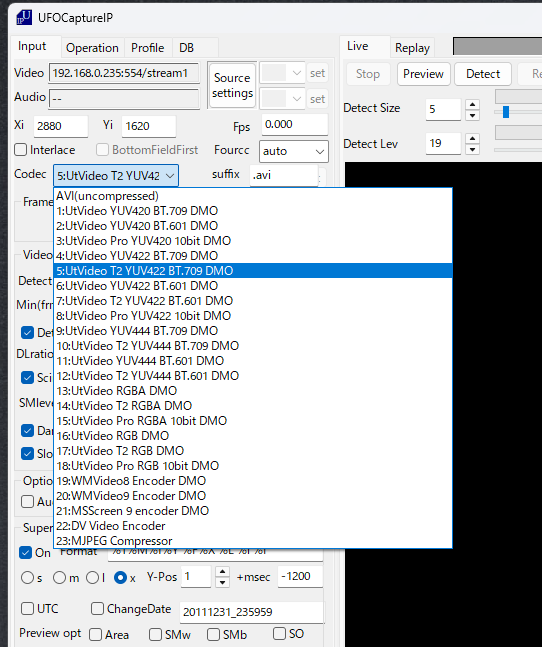
現状で確認が取れているものは以下のものです。
UtVideo T2 YUC422.Bt709 DMO
これは以下のページに記載されているUtVidoの最新バージョンのバイナリの exe installerをダウンロードし、セキュリティを許可した後に実行してインストールするとUFOCaptureIP Inputシート codec欄で選択できるようになります。
http://umezawa.dyndns.info/wordpress/?cat=28
| 説明: |
| UtVideo T2 YUC422.Bt709 DMO の選択 |
|
| ファイルサイズ: |
77.68 KB |
| 閲覧数: |
2782 回 |
|
|
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Mon Mar 16, 2026 10:52 am 記事の件名: UFOCaptureIP スーパーインポーズの設定 |
|
|
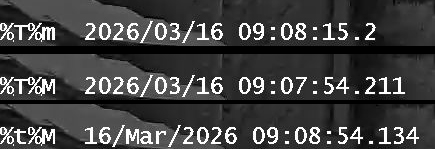
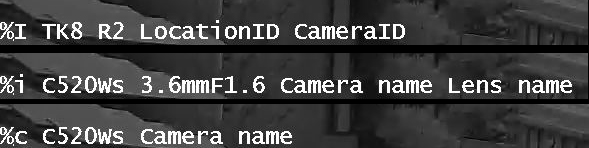
UFOCaptureIPでは s,m,l のサイズ選択に新に x (28x58pixel)が追加されました。
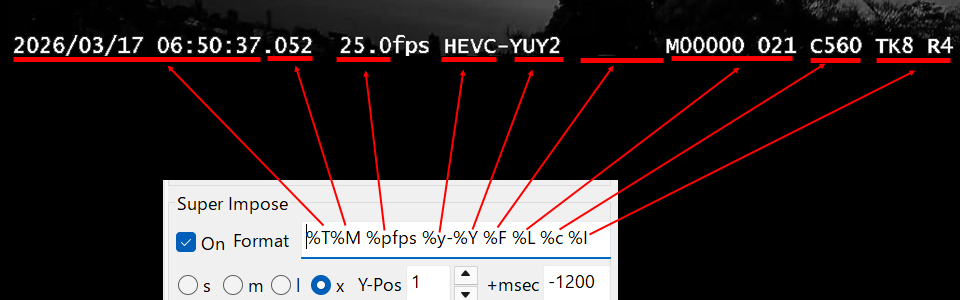
あと、%p : 実測fps表示, %y : デコード前fourcc表示 %c: カメラ名のみの表示 が追加されました。
以下に Super Impose 設定が可能な全記述子の例を載せておきます。任意に設定してください。任意の英数字文字列も書けます。
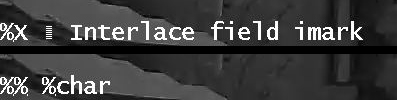
尚、その他の "%X" はインタレースかプログレッシブかを見極めるためのマークで
プログレッシブなら 縞模様に見え、インタレース時は奇数フィールドと偶数フィールドで白か黒の一色にみえます。bottom field first かどうかは マークが黒のフィールドが時間的に先に来るかどうかで判断します。
| 説明: |
|
| ファイルサイズ: |
54.46 KB |
| 閲覧数: |
2707 回 |
|
| 説明: |
|
| ファイルサイズ: |
67.21 KB |
| 閲覧数: |
2707 回 |
|
| 説明: |
|
| ファイルサイズ: |
30.04 KB |
| 閲覧数: |
2707 回 |
|
| 説明: |
|
| ファイルサイズ: |
93.07 KB |
| 閲覧数: |
2658 回 |
|
| 説明: |
|
| ファイルサイズ: |
142.34 KB |
| 閲覧数: |
2658 回 |
|
|
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Wed Mar 25, 2026 6:42 am 記事の件名: Windows スマートアプリコントロールの解除 |
|
|
近年のWindows Updateにより、Microsoft Store 以外からダウンロードしたアプリの実行を禁止する設定が追加され、デフォルトで有効に設定されました。
UFOシリーズや必要なフィルタやコーデック類のインストールと動作のためにはこの設定を無効化する必要があります。
自己責任となりますが、以下が無効化の手順です。
| 説明: |
| Windowsの設定からプライバシーとセキュリティに行きWindowsセキュリティを開く |
|
| ファイルサイズ: |
108.08 KB |
| 閲覧数: |
2342 回 |

|
| 説明: |
| Windowsセキュリティでアプリとブラウザの制御へ行く |
|
| ファイルサイズ: |
93.82 KB |
| 閲覧数: |
2342 回 |
|
| 説明: |
| アプリとブラウザコントロールからスマートアプリコントロールの設定へ行く |
|
| ファイルサイズ: |
65.54 KB |
| 閲覧数: |
2342 回 |

|
| 説明: |
|
| ファイルサイズ: |
52.19 KB |
| 閲覧数: |
2342 回 |
|
|
|
| トップに戻る |
|
|
SonotaCo
Site Admin
登録日: 2004.08.07
記事: 13540
所在地: 139.67E 35.65N
|
| 日時: Thu May 14, 2026 7:50 pm 記事の件名: シンチレーションマスク補足説明 |
|
|
FOCaptureIP V5.05以降は SMlevelを自動調整する autoSML 機能が追加されました。
これに合わせて、シンチレーションマスク補足説明です。
シンチレーションマスクとは夜空の星の瞬きによ明度変化をマスクして動体検出感度を上げるためのUFOCaptureオリジナルの機能です。
シンチレーションマスクは以下のメカニズムになっています。
1.動画の各画素の明度の時間平均(Exponential Moving Average,時定数はSMspeedにより決定)をリアルタイムに更新していきます。
2.フレーム毎に周囲より一定割合(SMlevel/100)以上明るい画素を空間フィルタを使って検出します。
3.検出された画素とその周囲をSMsizeと明度差により決定した大きさでマスクしてその内部の明度変化を動体検出の対象から外します。
4.シンチレーションマスク情報はクリップ内のM.bmpの青チャネルに保存し、UA4に引き継がれ、UA4で星像位置の探索用に利用されます。
シンチレーションマスクの状況は以下で確認することができます
1. Liveシート: InputシートのPreview optのSMw をオンにすると Live上に白い点で表示されます。
2. Liveシート: InputシートのPreview optのSMb をオンにすると Live上に黒い点で表示されます。
3. Replayシート: +SCLmask チェックボックスをオンにするとReplay状に青い点で表示されます。
4. M*M.bmp:青点として記録されます。
5. UA4:ViewシートのSMチェックボックスをオンにするとView上に白い点で表示され、Maskシートでは青い点として表示されます。
(1.2は動体検出時にはクリップのピークホールド静止画に記録されてしまうので、通常運用中はオフにしてください)
シンチレーションマスクの調整
シンチレーションマスクは画面内で10個から100個程度の星を必要最低限でマスクしていることが理想です。
SMlevelを上げるとマスク数は減り、下げると増えます。SMlevlが小さ過ぎるとマスクで画面全体が覆われます。
UFOCaptureIP V5.06では autoSML>チェックボックスをオンにすると シンチレーションマスクの原因となる画面内独立高明度ピクセル数が一定数(150)になるようにSMlevelが自動調整されます(日中画像や曇天などでマスクができない場合には SMlevelは下限の102,0になります)
(地上風景やホットピクセルにシンチレーションマスクが掛かると自動調整が不正確になります。これらは Detect Area Edit で領域マスクし、シンチレーションマスクがかからないようにしてください)。
SMspeedを上げるとマスクの変化速度が上がります。30fps程度では殆どの場合、デフォルトの2が適切です。
フレームレートが遅い場合または望遠レンズを使用している場合でマスクの変化が恒星の位置変化に追いつかない場合にはSMspeedを上げてくざださぃ。
SMsizeを上げると個々のマスクの大きさが大きくなります。レンズのシャープ差や解像度によりますが、赤色巨星などの星像が大きく、そのシンチレーションがマスクの外に出てしまう場合にはサイズを上げてください。(DMK33GX290e GigEカメラの場合は105から110程度に設定する必要があります)
その他、地上風景や撮像素子のホットピクセルはその周囲の明度差に星像以外のシンチャーションマスクを発生させるため、これはUA4での測定誤差を増やしSMlevelの自動調整機能にも影響を与えます。
このため地上風景や撮像素子のホットピクセルはDetect Area Editで観測対象外となるようにDA*.bmpを編集してください。
尚、ホットピクセルはDetect Area Editで以下の手順により、複数のクリップに共通するマスクを自動検出して自動設定することができます。
1.ホットピクセルがシンチレーションマスクされている時刻の違う3つか4つのクリップのみをMainシートのクリップリストでチェック状態にします。
2.Detect Area Editを開き、コントロールキーを押しながら Auto Set の setボタンを押し、確認ダイアログでOKを押します。
3.saveして、そのファイル名がDetect Areaに指定されていることを確認します。
4.SMwチェックボックスをオンにして、Preview画面でホットピクセルにマスクがかかっていることを確認します。
| 説明: |
|
| ファイルサイズ: |
56.06 KB |
| 閲覧数: |
807 回 |

|
|
|
| トップに戻る |
|
|
|

